¿Qué es la robótica?
¿Qué es un robot?
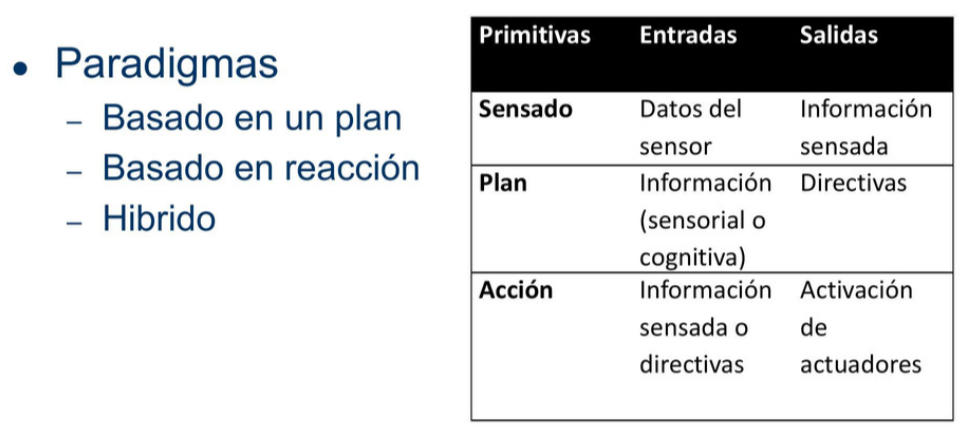
Paradigmas del sistema robótico
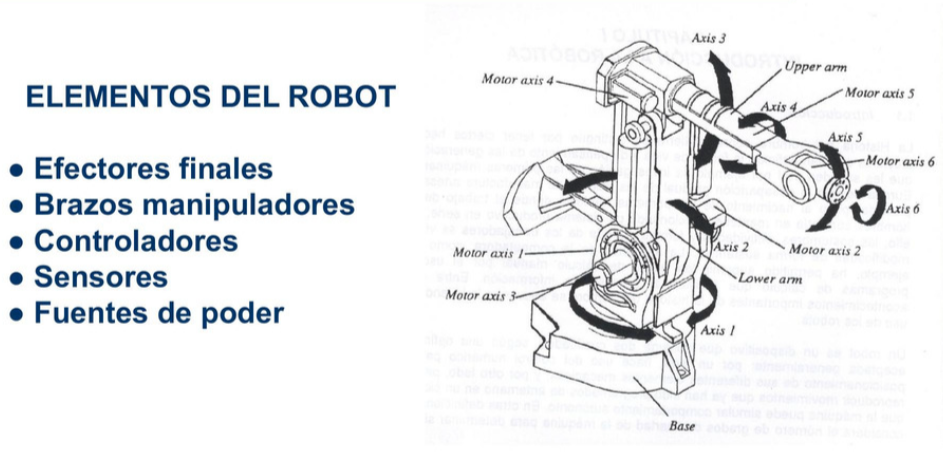
Elementos de un robot
Clasificación de los robots
1. Propósito o Función

2. Generación del sistema de control
Primera Generación
El sistema de control basado en las "paradas fijas" mecánicamente. Esta estrategia es conocida como control de lazo o control "bang bang".
Segunda Generación
Están equipados con sensores que les permiten recopilar información sobre su entorno. Estos sensores pueden incluir cámaras, sensores de proximidad, láseres o sistemas de visión computarizada. Utilizan algoritmos de aprendizaje automático para procesar esta información y mejorar su capacidad para realizar movimientos más complejos y adaptarse a nuevas situaciones.
Tercera Generación
Utiliza las computadoras para su estrategia de control y tiene algún conocimiento del ambiente local a través del uso de sensores, los cuales miden el ambiente y modifican si estrategia de control.
Cuarta Generación
Ya los clasifica de inteligentes con más y mejores extensiones sensoriales, para comprender sus acciones y el mundo que los rodea. Incorpora un concepto de "modelo del mundo" de su propia conducta y del ambiente en el que operan. Utilizan conocimiento difuso y procesamiento dirigido.
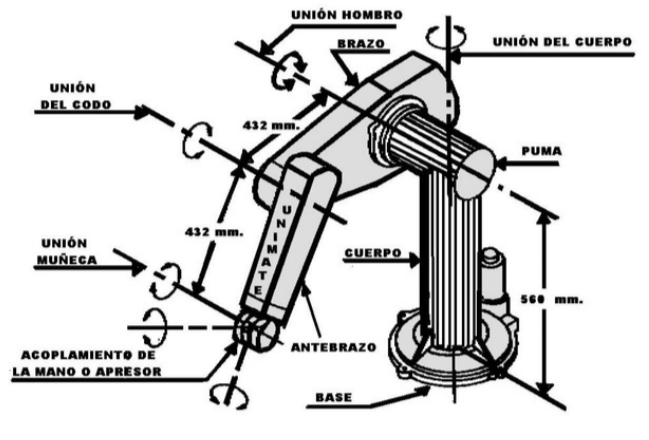
Anatomía del Robot
Tipos de configuraciones
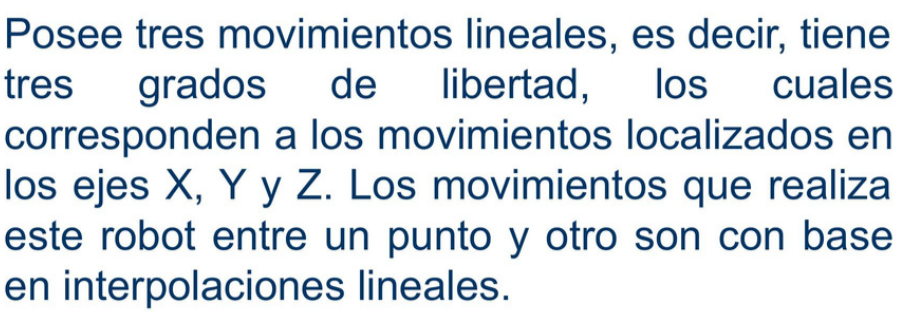
Configuración Cartesiana
Configuración Cilíndrica

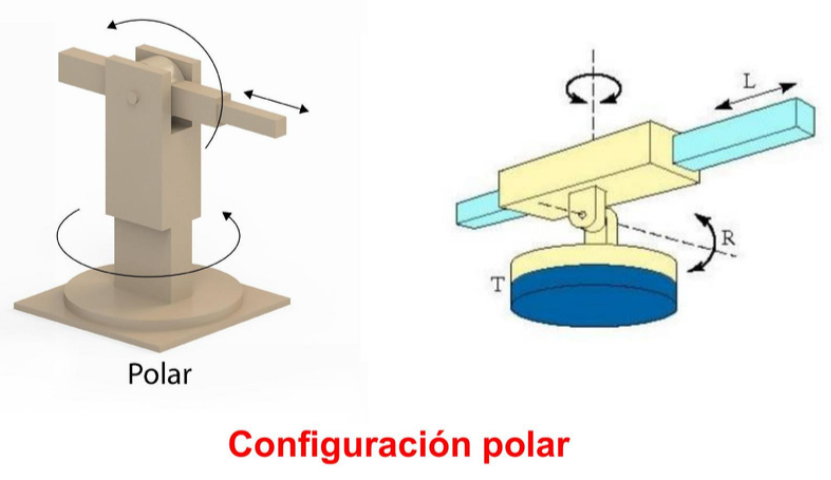
Configuración Polar
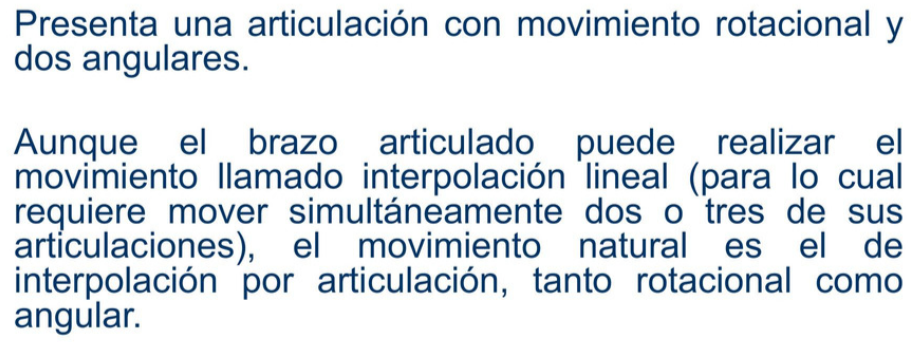
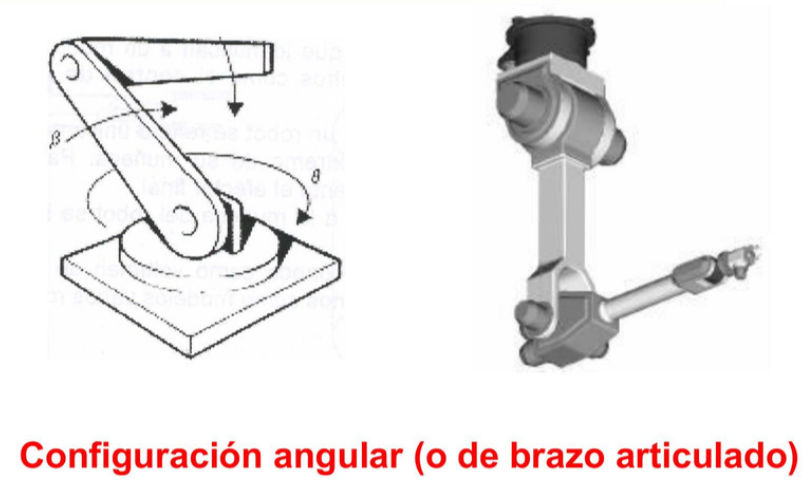
Configuración Angular
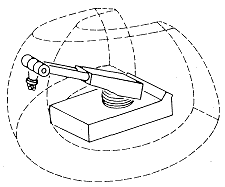
Volumen de trabajo
¿Qué es el volumen de trabajo?
Se refiere al área y el espacio físico dentro del cual el robot puede operar y realizar sus tareas.
Este volumen está determinado por los límites físicos del robot, como la longitud de sus brazos,
la amplitud de sus articulaciones y cualquier restricción impuesta por el entorno de trabajo.
El volumen de trabajo es determinado por las siguientes características del robot:
A. La configuración física del robot
B. Los tamaños de los componentes del cuerpo, brazo y de la muñeca.
C. Los límites de movimientos de las articulaciones del robot.
Precisión de Movimientos
¿Qué es?
Se refiere a la capacidad del robot para alcanzar y mantener posiciones específicas con la mayor exactitud posible.
Esta precisión es crucial en muchas aplicaciones donde se requiere manipulación precisa de objetos, como ensamblaje,
mecanizado, inspección y cirugía robótica, entre otras.
La precisión de movimientos en un robot industrial depende de tres factores:
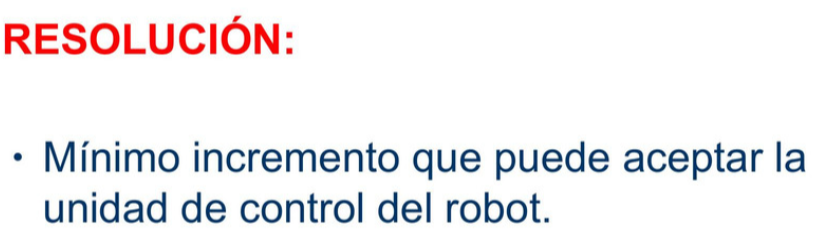
1. Resolución espacial
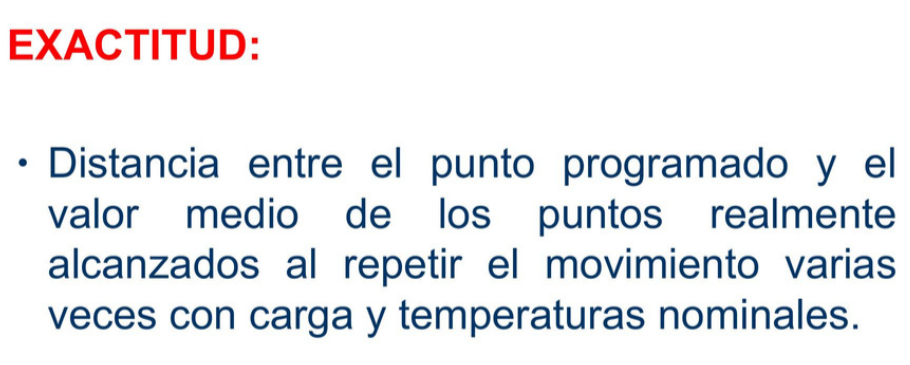
2. Exactitud
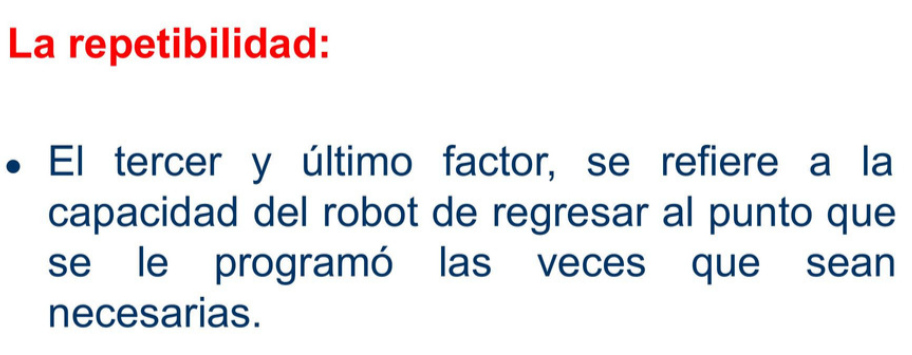
3. Repetibilidad
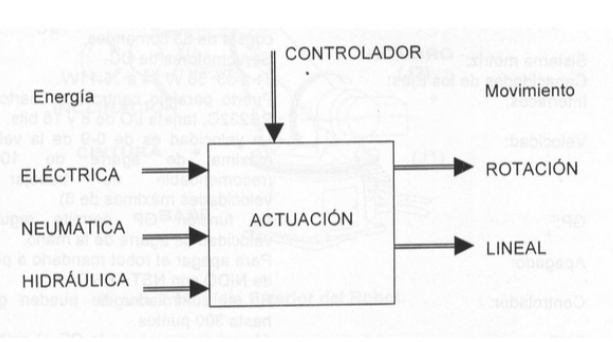
Sistema de Acondicionamiento de un robot